The research discussed that the framework could handle single and regular events and can use partial or incomplete prior knowledge to produce robust and informative estimates. Furthermore, the developed technique was demonstrated on an autonomous underwater vehicle (AUV) mission.
Background
Autonomous robots are widely used to perform critical missions in intense environmental conditions, such as infrastructure inspection, space exploration, and nuclear reactor repair. These works pose major challenges, such as high levels of autonomy, complex decision-making, and considerable uncertainty. To ensure the safety and effectiveness of the mission, autonomous robots continually verify their ability to complete the tasks and adapt accordingly.
However, current verification methods depend on quantitative techniques and cannot effectively handle the parametric uncertainty encountered by autonomous robots in these environments. For example, the rates of transition between different states of the robot, including task execution and failure, are often unknown or imprecise and may vary depending on the context. Using single-point estimates of these parameters can lead to invalid or inaccurate verification results and may compromise the robot’s performance and reliability.
About the Research
In the present paper, the authors proposed a powerful quantitative verification framework employing Bayesian learning methodology to overcome the limitation of single-point estimates. Their technique requires very little previous knowledge about the robotic devices and exploits its runtime to learn about the system parameters. Furthermore, these parameters are used to calculate the quantitative factors that support the decision-making of robots as intervals that capture the parametric uncertainty of the assigned work/mission.
The study used two different Bayesian inference methods for learning the system parameters, depending on whether they correspond to singular events such as catastrophic failures, one-off tasks, or regular events like repeated failures or tasks. For singular events, the authors developed a Bayesian inference using the partial priors (BIPP) method that computes two-sided bounded estimates for the transition rates using only partial prior knowledge instead of a complete prior distribution. For regular events, they used a Bayesian inference using imprecise probability with sets of priors (IPSP) method that computes two-sided bounded estimates for the transition rates using sets of prior distributions that reflect the imprecision of the prior knowledge.
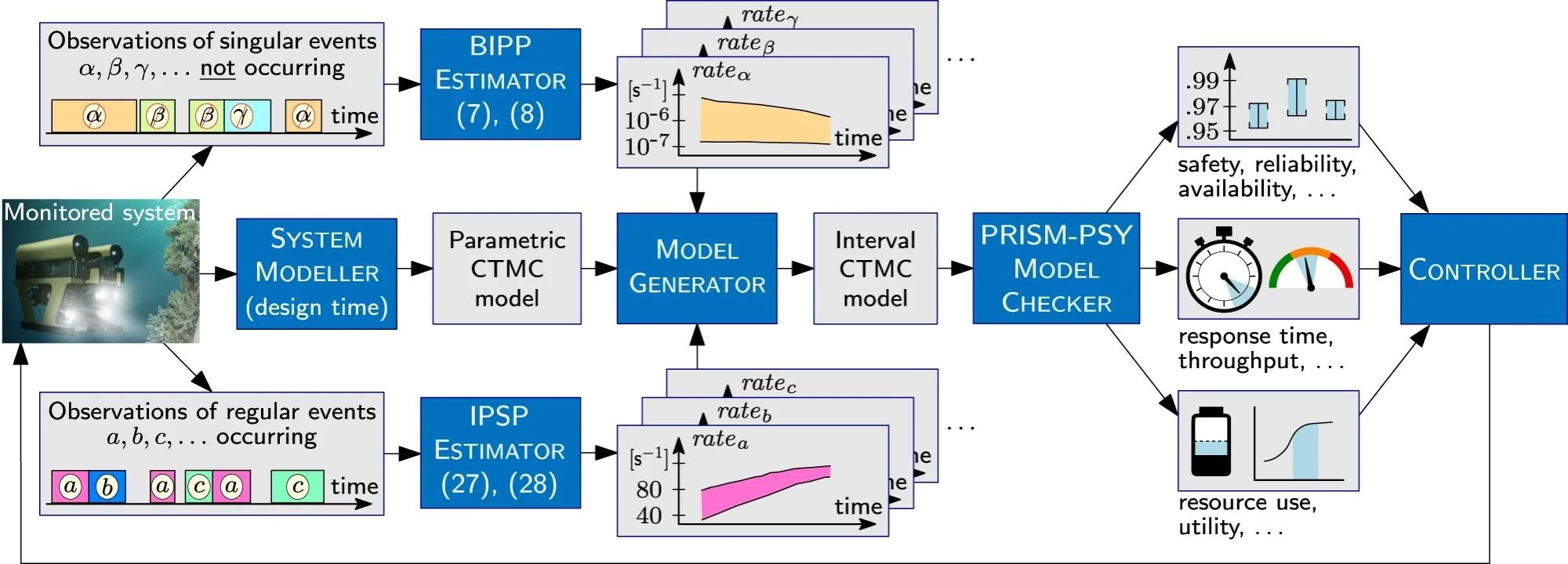 The integration of Bayesian inference using partial priors (BIPP) and Bayesian inference using imprecise probability with sets of priors (IPSP) with interval continuous-time Markov chain (CMTC) model checking supports the online robust quantitative verification and reconfiguration of autonomous systems under parametric uncertainty.
The integration of Bayesian inference using partial priors (BIPP) and Bayesian inference using imprecise probability with sets of priors (IPSP) with interval continuous-time Markov chain (CMTC) model checking supports the online robust quantitative verification and reconfiguration of autonomous systems under parametric uncertainty.
The researchers integrated their Bayesian inference methods with interval continuous-time Markov chain model checking technique, which supports the analysis of stochastic models with interval parameters. They implemented their framework using the precise graphics processing unit (GPU) accelerated parameter synthesis for stochastic systems (PRISM-PSY) probabilistic model checker and applied it to an AUV mission for offshore wind turbine inspection and maintenance.
Furthermore, the research demonstrated how the newly developed framework can support the AUV to perform a cleaning and structural health inspection mission of the underlying structure of an offshore wind farm. The AUV was deployed to collect data about the condition of six floating chains and, if needed, clean them using a high-pressure water jet. They had to cope with the uncertainty of the underwater environment, such as water perturbations and reduced visibility, and the uncertainty of the cleaning task, such as the probability of success, failure, or damage.
Research Findings
The outcomes showed that AUV has effectively used the presented framework to continually update its estimates of the transition rates based on observations and perform model checking to verify the quantitative properties of the mission, such as the probability of mission success, the expected energy consumption and the expected number of chains cleaned. Based on these properties, the AUV can decide whether to attempt to clean or skip the current chain and reconfigure its plan accordingly.
The authors measured the computational overheads of their framework and found that they were reasonable for the mission. They compared their framework with existing methods that use single-point estimates or frequentist confidence intervals and showed that their framework produces more robust and informative results that reflect the uncertainty intrinsic to the system.
The proposed framework has potential applications for a wide range of autonomous robots that operate in uncertain and dynamic environments, such as mobile service robots, spacecraft, drones, and robotic swarms. It can help these robots continually verify and adapt their behavior based on their observations and provide assurance evidence for their performance and reliability. Moreover, it can support the design and optimization of autonomous robots by enabling the analysis of different system configurations and parameters under uncertainty.
Conclusion
In summary, the novel framework is effective, efficient, and scalable for online verifying the performance of autonomous robots under parametric uncertainty. It leverages the power of Bayesian learning and interval continuous-time Markov chain model to estimate the key system properties.
After successful development, the authors applied their framework to an autonomous underwater vehicle mission for offshore wind turbine inspection and maintenance and demonstrated its effectiveness and efficiency. Their framework is a significant contribution to the field of autonomous robot verification, as it enables the exploitation of partial and imperfect prior knowledge and the analysis of singular and regular events under uncertainty. Moreover, their technology can be extended to other types of stochastic models and properties and integrated with other verification techniques.
 ASU’s Robotic Dogs Learn to Save Lives and Guide the Visually Impaired
ASU’s Robotic Dogs Learn to Save Lives and Guide the Visually Impaired