In an article published in the journal Nature, the authors addressed the challenges of exploring the deep ocean, an environment characterized by extreme pressure, temperature, and darkness. They drew inspiration from deep-sea organisms and their unique adaptations to develop innovative, lightweight soft robots.
 Study: Deep-Sea Exploration Using Bioinspired Soft Robots. Image credit: Generated using DALL.E.3
Study: Deep-Sea Exploration Using Bioinspired Soft Robots. Image credit: Generated using DALL.E.3
Background
Exploring the deep sea is crucial for unveiling its hidden mysteries, biodiversity, energy resources, and mineral reserves. However, this endeavor is hindered by the extreme conditions of the deep ocean, including high pressure, low temperatures, and perpetual darkness. Traditional deep-sea exploration relies on rigid, pressure-resistant robot designs, which limit adaptability and are prone to structural issues. The need for resilient and agile deep-sea robots has led researchers to draw inspiration from deep-sea organisms, which exhibit remarkable pressure tolerance and adaptability.
The present study focused on bioinspired deep-sea soft robots, which mimic the characteristics of deep-sea creatures, such as pliability, adaptability, and pressure resilience. These robots offered a paradigm shift in exploring and interacting with the deep ocean's delicate ecosystems. By combining principles of bioinspiration, actuation, sensing, and mechanical design, the authors aimed to bridge the gap between aquatic soft robotics and deep-sea exploration. It addressed the unique challenges posed by the deep sea and outlined future directions for enhancing these soft robots' capabilities, making profound oceanic exploration a reality.
Designing methods
To address the challenges of the deep sea, deep-sea robotic technology has been developed, but traditional designs involve metallic pressure enclosures that make the robots heavy and less adaptable to delicate tasks. The actuation principles for deep-sea soft robots drew inspiration from deep-sea invertebrates' hydrostatic skeletons and muscular hydrostats. Hydraulic soft actuators, resembling a flexible chamber filled with water, offered multi-degree-of-freedom motions under high hydrostatic pressure.
Meanwhile, muscle-like actuation was achieved through dielectric elastomer actuators (DEAs), which deformed when a voltage was applied, providing rapid and efficient actuation. Phase-change materials, inspired by the sperm whale's buoyancy control mechanism, had potential applications in compact actuation, adjusting buoyancy by undergoing phase transitions.
Pressure resilience in deep-sea soft machines took cues from the adaptations of deep-sea creatures. The hadal snailfish's low-modulus skeleton and distributed skulls inspired the design of pressure-resilient robots. By decentralizing electronics and embedding them within a soft matrix, robots could better withstand hydrostatic pressure, enhancing their resilience and adaptability.
Sensing in deep-sea soft robots was inspired by various sensory modalities seen in deep-sea creatures. Tactile sensing was employed, mimicking the long appendages and unique organs of these creatures for non-destructive interactions. Optical waveguide-based tactile sensors offered object recognition and localization in high-pressure environments. Contactless sensing techniques, inspired by electrolocation in deep-sea fish, utilized electric fields and electroreceptor arrays to detect objects without physical contact. Echolocation, akin to cetaceans, allowed robots to perform remote communication and echolocation through flexible acoustic transceivers.
These bioinspired design principles offered innovative solutions for creating deep-sea soft robots capable of exploring and operating effectively in challenging, uncharted ocean depths. The combination of actuation, pressure resilience, and sensing strategies allowed these robots to perform delicate manipulation, autonomous object location, and remote communication in extreme underwater conditions, advancing our understanding of the deep ocean.
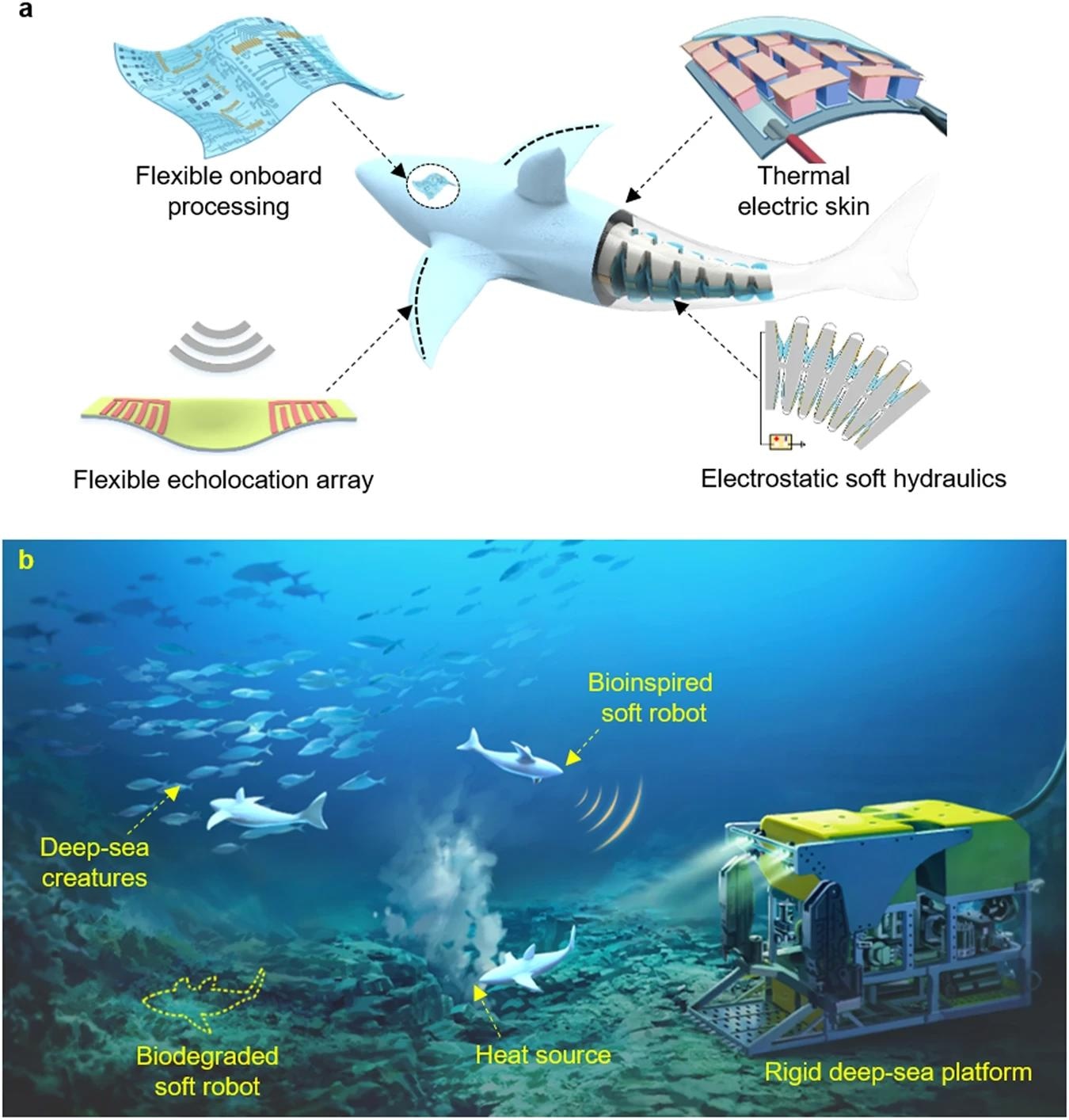
a By integrating soft electrostatic hydraulic actuation, soft sensory arrays, embodied energy regeneration skins, and flexible onboard processing electronics, future deep-sea soft robots could enable long-endurance and more autonomous machine behaviors in deep-sea tasks. . b Bioinspired soft robots will enable scientists to perform in situ investigations of the deep-sea habitats, and to preserve the original deep-sea ecosystem.
Application
Deep-sea exploration benefits from developing soft robots, offering solutions for various scientific, geological, and archaeological tasks. These robots were designed to perform non-destructive deep-sea manipulation, and recent innovations showcased their ability to interact with delicate specimens gently. Researchers developed hydraulic soft grippers capable of sampling soft coral at depths exceeding 800 meters and 3D-printed soft hydraulic grippers that collect delicate deep-sea organisms at depths of 2224 meters. Universal jamming grippers were used in the deep sea at depths of over 1200 meters, highlighting their adaptability for various tasks.
Moreover, soft robotic arms were created for deep-sea exploration, integrating bending, rotary, and grasping units. These arms demonstrated dexterity and remote control via wearable sensors and were validated at hydrostatic pressures equivalent to 2300 meters of depth, making them suitable for deep-sea sampling. Soft robotic arms combined with locomotion were also developed, allowing legged robots with continuum arms to walk and manipulate the seabed.
Untethered deep-sea soft robotic swimmers, inspired by deep-sea snailfish, were designed to withstand extreme pressure conditions. These robots could free-swim at depths exceeding 3000 meters and have been field-tested at depths around 10,900 meters, opening new possibilities for deep-sea exploration.
Conclusion
In conclusion, deep-sea soft robotics has emerged as a transformative field with vast potential for scientific exploration and ecological preservation. These bioinspired soft robots enable delicate manipulation and non-destructive sampling of deep-sea specimens, enhancing our understanding of this remote environment. Challenges include improving actuation capabilities, robust sensing, and energy regeneration.
In the future, bioinspired soft robots could lead to groundbreaking deep-sea missions. By integrating advanced actuation, sensing, embodied energy regeneration, and sustainable manufacturing, these robots could offer long-endurance and autonomous capabilities for deep-sea tasks. They will contribute to scientific exploration and ecosystem preservation and provide unprecedented insights into the mysteries of the deep sea.
Journal reference:
- Li, G., Wong, T.-W., Shih, B., Guo, C., Wang, L., Liu, J., Wang, T., Liu, X., Yan, J., Wu, B., Yu, F., Chen, Y., Liang, Y., Xue, Y., Wang, C., He, S., Wen, L., Tolley, M. T., Zhang, A.-M., & Laschi, C. (2023). Bioinspired soft robots for deep-sea exploration. Nature Communications, 14(1), 7097. https://doi.org/10.1038/s41467-023-42882-3, https://www.nature.com/articles/s41467-023-42882-3
 ASU’s Robotic Dogs Learn to Save Lives and Guide the Visually Impaired
ASU’s Robotic Dogs Learn to Save Lives and Guide the Visually Impaired